

機器人應用實訓項目
一、 概述
1. 項目概述
本項目擬用以聯軸器的生產為目標,以機器人為主,輔以鋸床、車床、加工中心、機械手等輔助設備組建全自動化教學用生產線。主要展示桁架機器人、六關節機器人以及碼垛機器人和機器人在機床上下料、工件去毛刺、物料碼垛等領域的實際應用;配合全自動上料機構、輸送線、機器人第七軸、上下料抓手、專用夾具、去毛刺設備、視覺、安全圍欄等外圍設備及輔助功能,完美詮釋機器在工業自動化領域的應用,呈現一個綜合性、全領域化的機器人應用教學用生產線。
2. 產品信息
? 聯軸器圖紙如下:(可能會調整)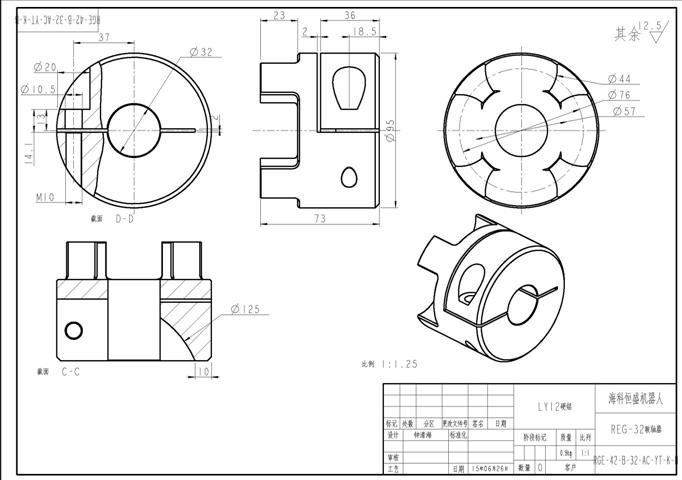
? 以此聯軸器從來料-毛坯-加工-去毛刺-裝箱的生產工藝為全自動化生產線的完成目標。
3. 項目的目的和意義
1) 項目的目的:
? 教學生全面認識桁架機器人、六關節機器人、碼垛機器人。
? 教學生全面掌握機器人在機床上下料、工件去毛刺、碼垛領域的實際應用。
? 教學生學習鋸床自動上料機構、輸送線、機器人第七軸、上下料抓手、專用夾具、去毛刺設備、視覺、安全圍欄等外圍設備及輔助功能與機器人的協同化工作。
? 教學生全面掌握桁架機器人、六關節機器人、碼垛機器人安裝、編程、調試及維護工作。
? 教學生學習和掌握機器人外圍設備及輔助功能的編程、調試和維護工作。
2) 項目的意義:
? 通過以聯軸器的生產為目標,以機器人為主,輔以鋸床、車床、加工中心、機械手等輔助設備組建全自動化教學用生產線;
? 展示桁架機器人、六關節機器人以及碼垛機器人和機器人在機床上下料、工件去毛刺、物料碼垛等領域的實際應用;
? 配合全自動上料機構、輸送線、機器人第七軸、上下料抓手、專用夾具、去毛刺設備、視覺、安全圍欄等外圍設備及輔助功能,完美詮釋機器在工業自動化領域的應用,呈現一個綜合性、全領域化的機器人應用教學用生產線;
? 提供一個可供實際學習和操作的自動化生產線平臺,提高學生的動手操作能力,為學生進入機器人應用相關行業做好技術鋪墊。
4. 主要設備布置圖及配置清單
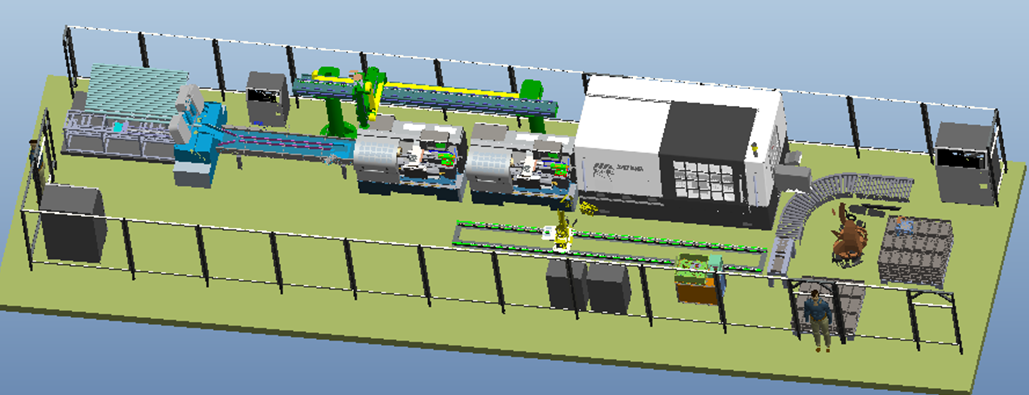
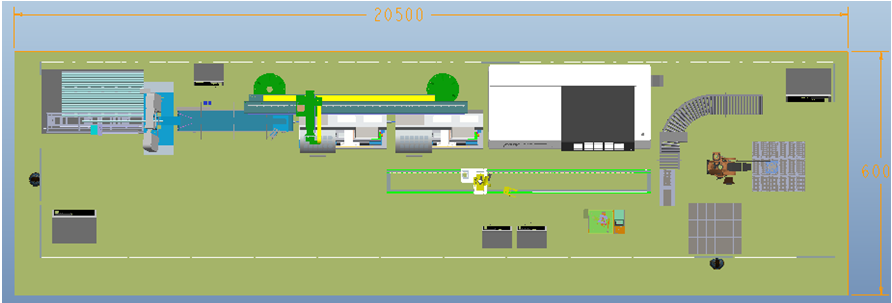
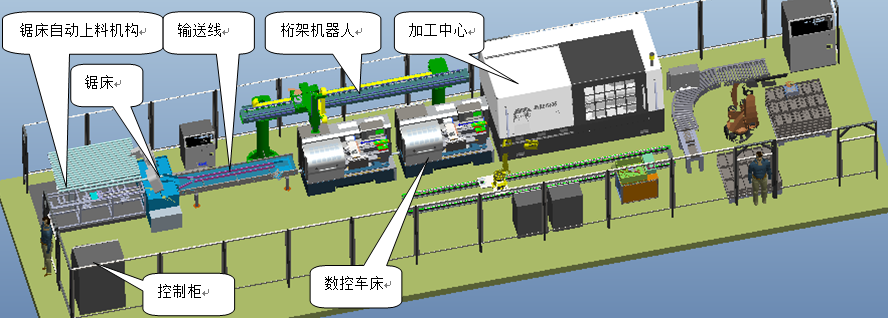
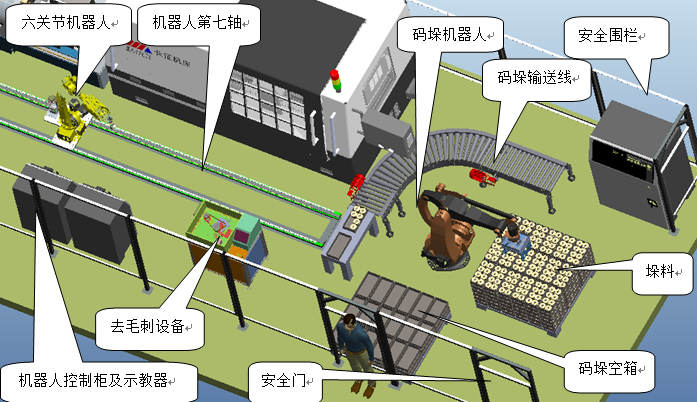
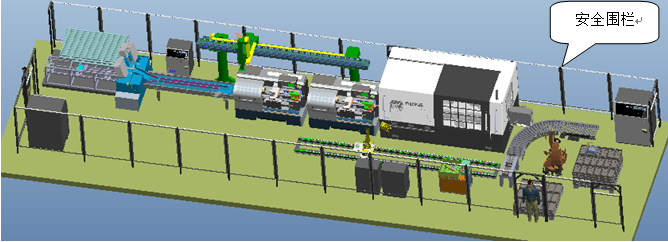
1) 三維布局圖:
2) 主要設備清單
主要設備清單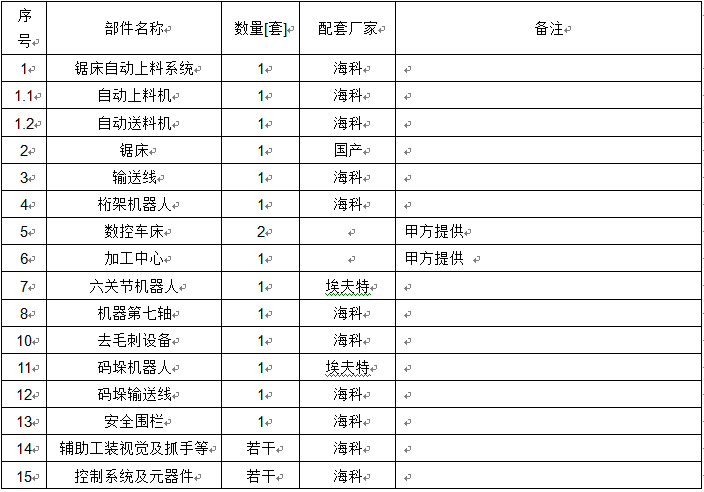
注:如以上配置發生變動,須有雙方確認的書面文件。
二、 系統功能及設備功能簡述
此系統是以聯軸器的生產為目標,以機器人為主,輔以鋸床、車床、加工中心、機械手等輔助設備組建全自動化教學用生產線。主要展示桁架機器人、六關節機器人以及碼垛機器人和機器人在機床上下料、工件去毛刺、物料碼垛等領域的實際應用;配合全自動上料機構、輸送線、機器人第七軸、上下料抓手、專用夾具、去毛刺設備、視覺、安全圍欄等外圍設備及輔助功能,完美詮釋機器在工業自動化領域的應用,呈現一個綜合性、全領域化的機器人應用教學用生產線。
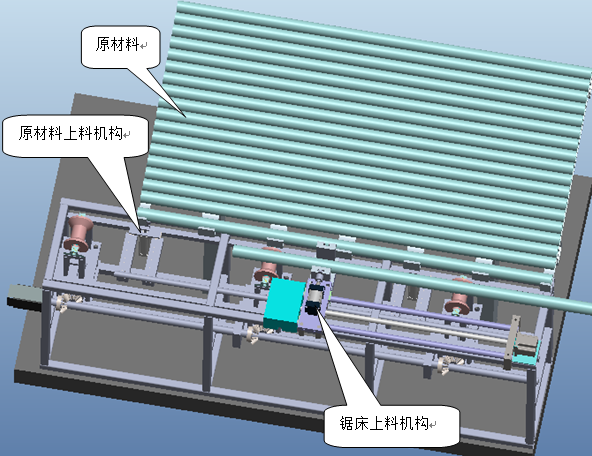
1. 原材料自動上料系統
? 此設備包含原材料上料機構、和鋸床自動上料機構。
? 原材料上料機構的功能是將成排麻煩的棒料分揀到鋸床自動上料機構上。
? 鋸床自動上料機構的功能是將單一的棒料送到鋸床切斷工位,按聯軸器毛坯長度送料,從而完成聯軸器的毛坯制作。
? 工作方式為,人工將原料棒料按一定規律碼放,原料上料機構自動分揀到鋸床上料機構,鋸床上料機構自動完成鋸床的上料和送料工作。結構示意圖如下:
2. 鋸床
? 鋸床的主要功能是將原材料切割成聯軸器加工所需的毛坯。具體形式和參數如下:

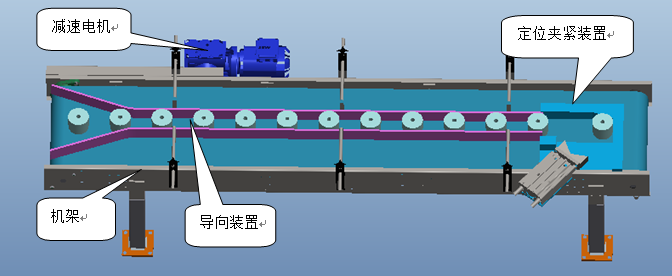
3. 輸送線
? 輸送線的功能是將鋸床的切好的毛坯件按一定規律輸送到桁架機器人的抓取范圍內。
? 其主要由機架、減速電機、輸送帶、導向裝置、定位夾緊裝置構成。
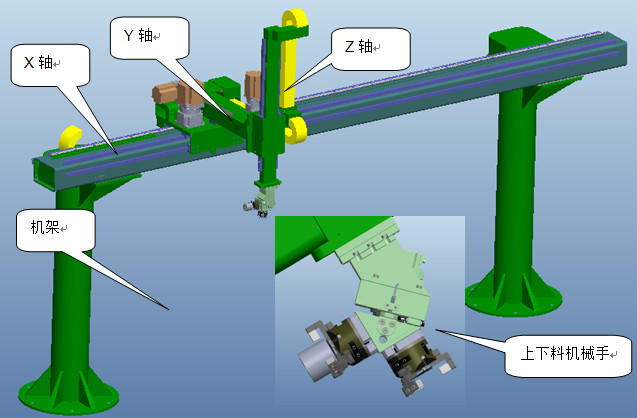
4. 桁架機器人
? 桁架機器人的主要功能是抓取毛坯和對兩臺數控車床上下料。
? 其主要由機架、X軸、Y軸、Z軸、上下料機械手構成。其示意圖如下:
5. 數控車床和加工中心
? 二者主要完成聯軸器的機械加工功能。
? 由于此設備為甲方提供,在此不做過多介紹。
? 數控車床及加工中心除現有加工和設備配套能力外,還需輔以專用機加工夾緊完成聯軸器的加工工作。
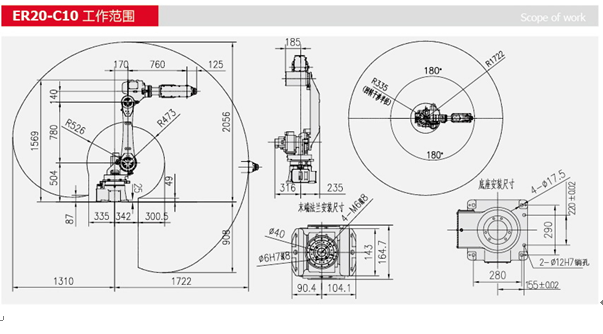
6. 六軸關節機器人
本系統選用efort六軸工業機器人,荷重20kg,工作半徑R1722mm,包括機器人本體、機器人控制柜、示教盒及供電電纜等。
機器人主要實現數控車床和加工中心的上下料以及配合去毛刺設備去除聯軸器加工后的毛刺,并完成成品的裝箱工作。
ER20-C10工業機器人結構緊湊,運動速度快,具有較高的重復定位精度和軌跡跟蹤精度,采用總線架構,擴展應用方便,適用于機床上下料、激光切割、打磨等行業。


7. 機器人第七軸
機器人七軸為機器行走機構,實現不同機床之間的上下料。此機構采用伺服電機驅動,齒輪齒條傳動,直線導軌導向,底座采用型鋼焊接,分段制造、整體組裝。具體結構見下圖。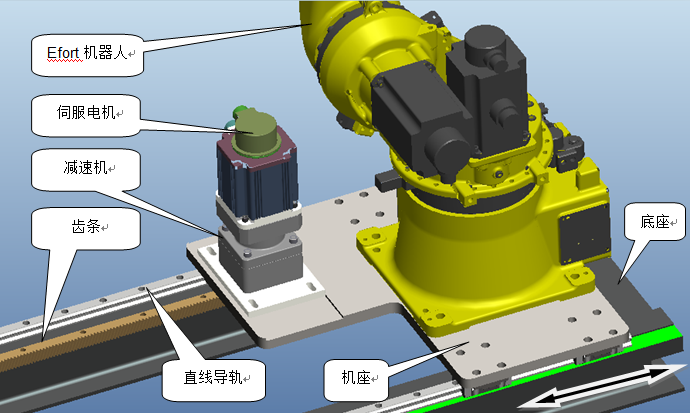
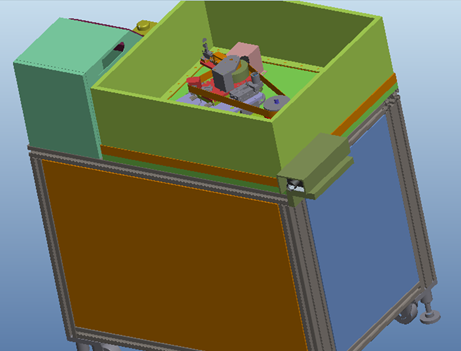
8. 去毛刺設備
? 主要功能是打磨并去除機械加工后留在聯軸器上的毛刺。
? 其主要由機架、電機、打磨帶、傳動機構、視覺。通過視覺較正聯軸器位置,然后對聯軸器進行打磨。參考圖片如下。
9. 碼垛系統
碼垛系統由碼垛機器人、碼垛輸送線、垛料、碼垛空箱等組成。主要功能是將單個的聯軸器裝箱,并按一定規律碼放到垛盤上,以方便叉車等轉運設備的運輸。
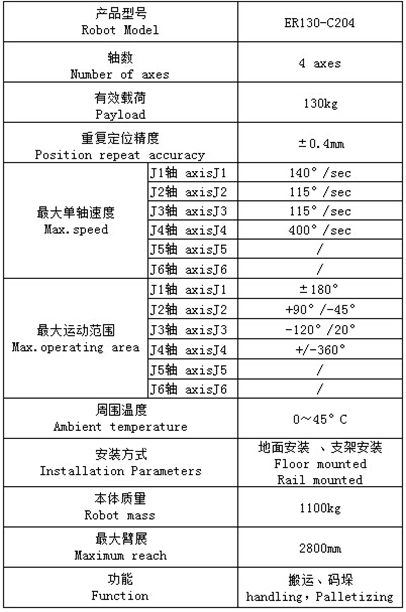
1) 碼垛機器人
ER130-C204型四軸碼垛機器人末端負載能力為130kg,重復定位精度達到±0.4mm,具有高速碼垛搬運功能,高速,穩定,適用于碼垛、拆垛等場合。

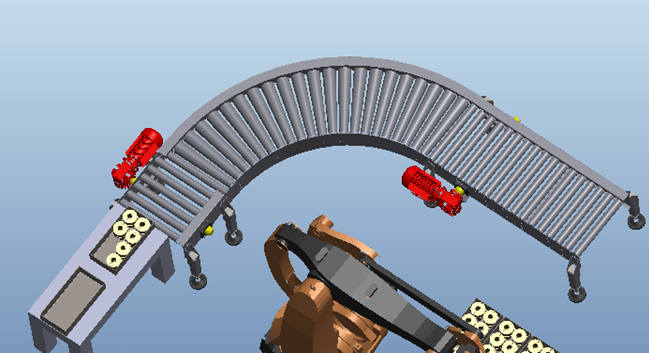
2) 碼垛輸送線
碼垛輸送線的功能是將整箱的聯軸器輸送到輸送線的另外一端,主要展示碼垛機器人的垛料來料方式基本為輸送線輸送。其主要由機架、減速電機、輸送滾筒、導向裝置、阻擋裝置、定位構成等構成。具體示意圖如下:
碼垛系統的工作流程簡述如下:
? 第一步:抓取碼垛空箱到固定位置。
? 第二步:六關節機器人將打磨完成的聯軸器裝入空箱。
? 第三步:碼垛機器人將裝滿聯軸器的箱子抓取放到碼垛輸送線上。(主要展示碼垛機器人的垛料全部是由輸送線輸送而來的)
? 第四步:碼垛機器人在碼垛輸送線的末端抓取垛料,然后按碼垛程序規則的放到垛盤上。
10. 防護圍欄
將所有運動設計布置于圍欄內,可以為工人及其他相關人員提供一個安全可靠的工作環境。圍欄布置有檢修和人工上料門,布置必要的檢測開關,并與整套控制系統聯動(當然,為了學生參觀實習的實際需求,也可以不做聯動,僅僅做展示用),在設備正常工作時,假如有人員闖入,將立即停止所有設備的運轉,確保人員安全。圍欄布置件下圖:
三、 工藝過程簡述
1. 聯軸器加工流程圖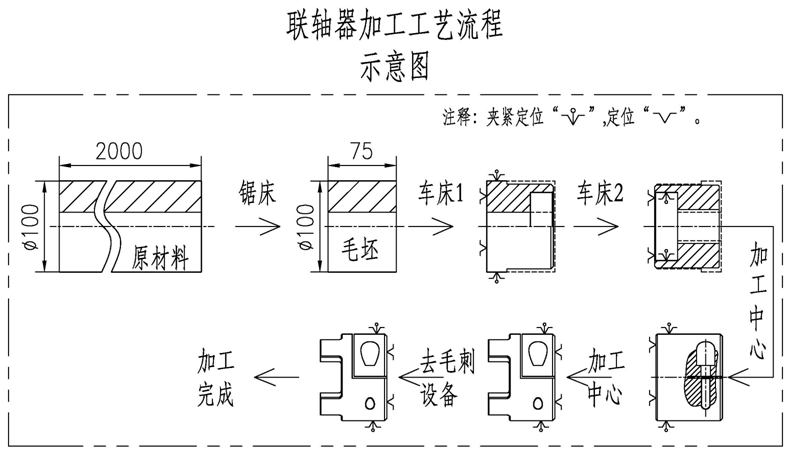
2. 設備動作流程
? 第一步:人工將原料成排放置于自動上料機構。
? 第二步:自動上料機構將成排放置原料的下面一根送入自動送料機。
? 第三步:自動送料機將原料送入鋸床,并按毛坯件的長度給鋸床送料,鋸床每切一個毛坯,自動送料機都將送料一次。
? 第四步:鋸床同送料機構一起完成毛坯件的下料。
? 第五步:輸送機在鋸床處理口接料,并將毛坯輸送到其上的毛坯定位機構上,等待桁架機器人的抓取。
? 第六步:桁架機器人抓取位于輸送機上的毛坯,然后搬運到數控車床1,并將完成對數控車床1的上料。
? 第七步:數控車床1完成對毛坯件的設定工序的自動加工。
? 第八步:桁架機器人完成對數控車床1的取料工作,然后將工件搬運到數控車床2,并完成對數控車床2的上料工作。
? 第九步:數控車床2完成對聯軸器設定工序的加工。
? 第十步:六關節機器人同第七軸協同工作完成對數控車床2的取料工作,然后將工件搬運到加工中心,并完成對加工中心夾具1的上料。
? 第十一步:加工中心完成對聯軸器在夾具1上設定工序的加工。
? 第十二不:六關節機器人同第七軸協同工作完成對加工中心夾具1的取料工作,然后將工件搬運到加工中心夾具2,并完成對加工中心夾具2的上料。
? 第十三步:加工中心完成對聯軸器在夾具2上設定工序的加工。
? 第十四步:六關節機器人同第七軸協同工作完成對加工中心夾具2的取料工作,然后將工件搬運至去毛刺設備。
? 第十五步:六關節機器人同第七軸協同工作,通過視覺完成對聯軸的姿態調整,然后六關節機器人、第七軸和去毛刺設備聯動完成對聯軸器加工后毛刺的打磨去除工作。
? 第十六步:碼垛機器人抓取聯軸器料箱到碼垛輸送線固定位置。
? 第十七步:六關節機器人同第七軸協同工作,將去完毛刺的聯軸器搬運到碼垛輸送線,并完成對聯軸的裝箱工作。
? 第十八步:碼垛機器人將裝滿聯軸器的料箱抓取放到碼垛輸送線上。(主要展示碼垛機器人的垛料全部是由輸送線輸送而來的)
? 第十九步:碼垛輸送線將聯軸器料箱輸送到其末端等待碼垛機器人的抓取。
? 第二十步:碼垛機器人在碼垛輸送線上抓取聯軸器料箱,然后按碼垛程序規則的放到垛盤上。
? 第二十一步:人工操作叉車將碼滿聯軸料箱的垛盤轉運出生產線。然后將空垛盤放到原來位置。
四、 環境條件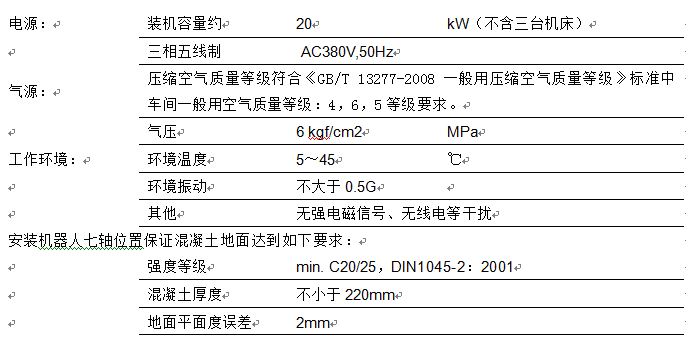

 川公網安備51012202001782
川公網安備51012202001782